In this article, we restrict our focus on faults (i) affecting a brittle layer overlying a proportionally weaker ductile layer (e.g., continental upper/lower crust, or brittle sedimentary cover overlying a viscous décollement; e.g., Fig. 2) and (ii) forming in response to regional extensional or strike-slip tectonic regimes. The following discussion does not apply to second-order faults that form within larger fault blocks in response to bending, folding, or distortion of larger fault blocks (e.g., in the hanging wall of normal faults; Dawers and Anders, 1995).
Figure 2. Graben relay in a brittle sedimentary cover
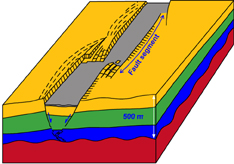
Example of graben relay in a brittle sedimentary cover detached above viscous evaporites (Trudgill and Cartwright, 1994).
Properly modeling a geologic system requires incorporating into the experimental model the main mechanical elements and boundary conditions characteristics of the natural prototype after appropriate scaling. Our prototype comprises a brittle layer resting on a weaker, viscous layer (Fig. 3) that may be denser (e.g., the lower continental crust) or less dense (e.g., an evaporitic layer). The weak, viscous layer may be thick, representing the lower crust or a thick evaporitic layer, or it may be thin, representing a detachment horizon located beneath a sedimentary cover. If the viscous layer is thick, fault blocks in the brittle layer should be free to subside or rise isostatically in response to tectonic thinning or thickening, or to syntectonic sediment deposition. Fault blocks can also freely rotate around both horizontal and vertical axes. By contrast, if the viscous layer is thin, block rotation around a vertical axis only can occur.
Figure 3. Simplified strength profiles
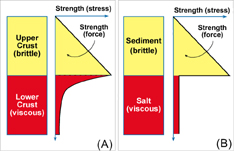
Simplified strength profiles for (A) the lower/upper continental crust, and (B) a brittle sedimentary cover above viscous evaporites.
Ideally, the best way to model the interaction between faults as they propagate along strike is to construct large brittle-viscous models, in which faults nucleate at randomly distributed locations, then propagate along strike. In practice, this approach is however technically difficult. On one hand, having a model in which many faults can nucleate randomly requires that the model width and length be large compared with the thickness of the brittle layer. On the other hand, the brittle layer needs to be thick enough so that the resolution in cross sections is high enough to provide detailed information on the 3-D geometry of the relay zone. In other words, appropriate modeling of along-strike fault interaction would require very large models, well beyond the size that is usually available in most modeling laboratories.
A more practical approach chosen by modelers has been to design experimental set-ups that (1) force faults to nucleate at predetermined locations while (2) allowing faults to propagate along strike and interact in relay zones. The risk associated with such designs is that the set-ups used to force the main two faults may also drastically influence the geometry and location of faults in the relay zones. In other words, the geometry of the relay zone is too much constrained by the imposed boundary conditions, rather than is the result of free interaction between the two offset faults as they propagate along strike. The experimental designs chosen by most authors (Faugère and Brun, 1984; Vendeville, 1991; Sims et al., 1999; and Le Calvez and Vendeville, 1996) involve the use of a basal plate that forces faults to form along its edges, which act as velocity discontinuities triggering the formation of faults in the overlying brittle layer. In some experiments, the brittle layer rests directly on the basal plate. In others, a viscous layer is intercalated between the basal plate and the brittle layer.
In the following section, we review the models' designs and results for each type of set-up, as well as discuss their appropriateness (1) in terms of mechanical properties and boundary conditions and (2) in reference with the natural prototype. We then introduce a radically new design (Le Calvez and Vendeville, 1999), in which faults are not triggered by a basal plate and can freely propagate along strike.