Introduction
Spiral inclusion trails have been previously used for the interpretation of shear sense (e.g. Bell & Johnson, 1992), fold mechanisms (e.g. Stallard & Hickey, 2001), crenulation development, and the history of microstructural deformation in metamorphic rocks (e.g. Stallard, 1998). Despite the large numbers of publications that have sought to resolve the problematic origin and significance of spirals (e.g. Passchier et al, 1992; Bell et al, 1992), relatively few data have been presented to describe the 3D formation of spirals, or the 3D geometry of spirals (see Johnson, 1993a and Gray & Busa, 1994 for existing 3D data). Reconstructing the 3D spiral geometry, both from real rocks and using numerical simulations, is therefore important for our understanding of the mode of spiral formation, our interpretation of spirals, and for our interpretation of the varied 2D inclusion trail geometries encountered in thin sections containing spiral porphyroblasts.
Early attempts to model the geometry of spiral inclusion trails were either based on simplified mechanical models (Rosenfeld, 1970; Schoneveld, 1977) or conceptual models (Powell & Treagus, 1967, 1970). Masuda & Mochizuki (1989) presented the first 2D numerical simulations of spiral formation, and this was followed by a similar study by Bjornerud & Zhang (1994) and a 3D analysis of the problem by Gray & Busa (1994). Johnson (1993a) used serial sections to reconstruct the 3D geometry of spiral inclusion trails from real rocks, and most recently, Williams & Jiang (1999) provided a conceptual interpretation of the 3D geometry of spiral inclusion trails developed according to the ‘non-rotation’ model of spiral development. The non-rotation model describes spiral formation by irrotational garnet growth over multiple overprinting near-orthogonal foliations or crenulation cleavages (e.g. Bell, 1985; Bell & Johnson, 1989). In contrast, the rotation model predicts progressive capture of a single matrix foliation within a growing porphyroblast that is rotating in response to foliation-parallel shear (e.g. Spry, 1963; Passchier et al., 1992).
This study seeks to extend the work of previous studies by using numerical simulations to document both the 3D development of spirals, and the 3D geometry of the completed simulations. The aim is to assess the varied spiral geometries produced under different simulation conditions, and provide a visual aid to help researchers visualise the 3D development of spirals. Simulations were carried out to represent both the rotation and non-rotation models of spiral development. We also conducted simulations to explore the effect on spiral geometry of varying such factors as: degree of coupling between sphere and matrix, growth rate of sphere, angle between initial foliation and shear plane, and ratio of simple shear to pure shear.
For the numerical simulation of spiral development, we use the 3D hydrodynamic model described in detail by Masuda & Ando (1988) and Masuda & Mochizuki (1989). The porphyroblast and matrix are modelled numerically as a rigid sphere embedded in a Newtonian viscous fluid. The sphere volume increases at a constant rate, and growth is assumed to involve volume-for-volume replacement of the fluid matrix. Deformation of the matrix is by simple shear far from the sphere, and when coupled to the matrix, the sphere rotates at a rate equal to half the far field simple shear strain rate. Porphyroblast rotation in the numerical simulations is described relative to the simulation boundaries. The velocity vector is continuous and equal to zero at the interface between the sphere and matrix, and there is no slip at the interface. Marker particles are set in the matrix to represent the foliation, and these move passively as the matrix deforms, while those included in the growing sphere rotate as the sphere rotates. We first conducted simulations to represent both the rotation and non-rotation models of spiral development (see below for simulation descriptions). For these simulations, the initial radius of the sphere was set at 0.1, and the increase in sphere volume per unit time was 0.001. The far field strain rate was 0.002 per unit time, and both sets of simulations were run until a far field shear strain value (gamma) of 8. Additional simulations were run to test the effect of changing the values of such variables as sphere growth rate on the resulting 3D spiral geometry, and the conditions of these simulations are described at the relevant parts of the text.
Description of rotation and non-rotation simulations
The rotation
simulation involved foliation-parallel simple shear deformation, and this
results in shear-driven rotation of the sphere (Fig. 1a). The non-rotation
simulation involved simple shear deformation and the development of four
overprinting orthogonal foliations, without rotation of the sphere. The
change to each new foliation was modelled by rotating the shear plane
90ž, while ensuring that shear sense was kept constant (i.e. consistently
clock-wise or anti-clockwise) during the course of the simulation. The
timing of each new foliation was decided at the stage where the currently
deforming matrix foliation, adjacent to the sphere, had developed approximately
90ž rotation relative to the sphere (Fig. 1b). The non-rotation model,
as described by Bell (1985) and Johnson (1993b), involves partitioning
of matrix deformation into zones of coaxial shortening close to porphyroblasts,
and zones of non-coaxial strain that anastomose around the porphyroblasts.
Such a pattern of strain partitioning is too complex to model numerically,
so we modelled matrix deformation under conditions of simple shear. We
consider this to be an adequate approximation for the following reason.
In the non-rotation model, inclusion trail curvature, and ultimately spiral-shaped
inclusion trails, originate from crenulation of the matrix foliation in
zones of non-coaxial strain (cleavage seams of a developing crenulation
cleavage) adjacent to the growing porphyroblast. The curved (crenulated)
foliation is later included within the porphyroblast as it grows toward,
and eventually over the adjacent cleavage seam. Thus, although Bell (1985)
describes the porphyroblast as occupying a zone of coaxial strain, for
the purposes of our numerical simulation it is more appropriate to deform
the matrix by non-coaxial shear. Given this pattern of non-coaxial deformation,
the non-rotation simulation should theoretically result in sphere rotation.
In order to solve this inconsistency, we imposed a condition of non-rotation
upon the sphere (parameter k of Bjornerud & Zhang, 1994),
and removed the spin-related part of the velocity field (the total velocity
field is calculated from two components: the matrix velocity vector and
the component of shear due to effect of rotation of sphere on surrounding
matrix). This does not affect the validity of the physics of matrix fluid
flow (and particle movement) around the non-rotating sphere. The suitability
of our simulation as an approximation of Bell’s (1985) non-rotation
model can be assessed from Figure 2, which compares the velocity vector
pattern from our non-rotation simulation with Bell’s deformation
partitioning model. The simulation approximates a single microlithon of
Bell’s model. The proposed area of coaxial strain adjacent to the
porphyroblast (light grey area in Fig. 2a) is approximated in the simulation
by an area of low flow velocity (light grey area in Fig. 2b), which although
not coaxial, is a zone of minimal particle flow.
The numerical modelling described above involves limitations and assumptions
resulting from the necessary numerical simplification of a complex natural
system. The heterogeneous rock matrix is modelled as a homogeneous fluid,
and the porphyroblast as a perfect sphere. Important strain accommodation
such as crenulation development, recrystallisation, and grain-scale deformation
processes are not simulated. In the non-rotation simulation, we impose
a condition of non-rotation upon the sphere, although under the physical
conditions of the simulation the sphere should rotate. These kinds of
limitations are common to previous studies of spiral development (Masuda
& Mochizuki, 1989; Bjornerud & Zhang, 1994; Gray & Busa, 1994),
but do not preclude the geologic relevance and value of such an investigation.
Thus, the modelling provides a useful and instructive approximation of
the end-member models, and provides an advance of our interpretation of
these controversial microstructures.
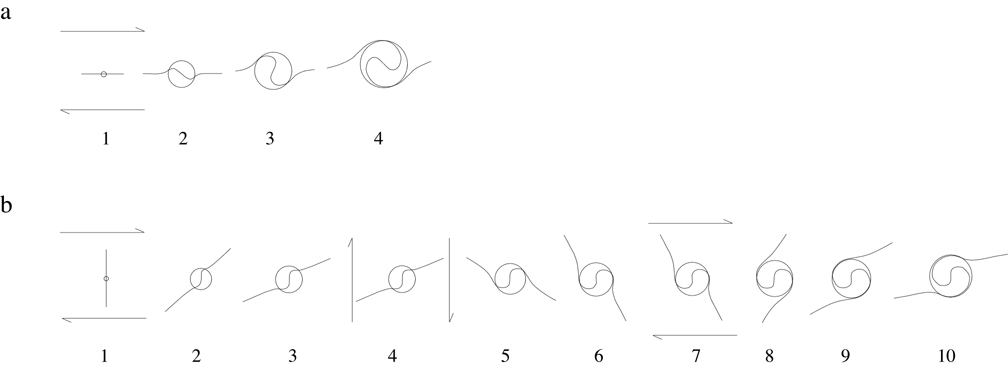 |
| Figure 1. Figure 1. Schematic description of the rotation and non-rotation simulations used in this study. (a) Rotation simulation. The matrix is deformed by foliation-parallel simple shear, and the growing sphere is fully coupled to the surrounding matrix. (b) Non-rotation simulation. The irrotational sphere grows during the development of four overprinting orthogonal foliations. New foliations are initiated at stages 1, 4 and 7. Note: The division of each simulation into numbered stages indicates progressive development of the spiral, and the divisions don’t represent equal intervals of time or deformation. (Click for enlargement) |
 |
| Figure 2. Comparison of non-rotation simulation with the non-rotation model as described by Bell (1985). (a) Strain partitioning model of Bell (1985). The porphyroblast (dark grey) lies within a field of coaxial strain (light grey) and thus does not rotate with respect to shear plane. Strain is partitioned into zones of shear (white) that are represented by cleavage seams in real rocks. The outer microlithons do not house porphyroblasts, and thus strain within these areas is non-coaxial. (b) Velocity vector field of the non-rotation simulation used in this study. The lengths of the bars indicate the relative magnitude of flow velocity, and the orientation indicates flow direction. The spherical porphyroblast (dark grey) is surrounded by an area of low matrix velocity (light grey), although this zone is non-coaxial (cf. Fig. 1a). The areas of higher matrix velocity (white areas) undergo strongly non-coaxial shear, which corresponds to the white areas in Fig. 1a. The simulation represents the central microlithon, porphyroblast and adjacent zones of shear as shown in (a). (Click for enlargement) |